Integrated RTK + SLAM fusion
CHCNAV's 4th-generation air-dielectric GNSS antenna and a 1408-channel board feed the SLAM engine for under-3 cm RTK in challenging conditions and 5 cm fused absolute accuracy.





Versatile Survey-Grade Mapping—Indoors & Out
The CHCNAV RS10 brings RTK GNSS, visual SLAM, and high-precision LiDAR scanning together into one rugged, handheld platform—perfect for comprehensive 3D mapping in both GPS-covered and GNSS-denied environments. Weighing just 1.9 kg (with GNSS and battery), it’s rugged (IP64), portable, and ready for building interiors, tunnels, forests, power-line corridors, and more.
Integrated GNSS RTK + SLAM Fusion
Combines CHCNAV’s 4th-gen GNSS Smart Antenna and SLAM engine to deliver 5 cm absolute accuracy with 1 cm relative precision, even across satellite-denied zones.
Real-Time, Georeferenced SLAM Mapping
Instantly view georeferenced point clouds in the field—no loop closures, no post-processed georeferencing—cover areas up to 13,000 m² in a single session.
High-Performance LiDAR & IMU
Capture up to 640,000 pts/sec (on the 32-line model) across a 360°×270° FoV, with a range of 0.05–300 m and up to 2 return echoes.
SFix Technology for GNSS Gaps
When satellite coverage fails, SFix uses LiDAR and SLAM data to achieve 5 cm accuracy within 1 minute, enabling loop-free scanning in urban canyons and indoor spaces.
Contactless Vi‑LiDAR Measurements
Real-time coordinate capture via the LiDAR/RTK visual interface (LandStar), accurate to 5 cm at 15 m, without physical targets.
Lightweight, Field-Ready & Hot-Swappable
Under 2 kg total, with 60 min per battery and hot-swap capabilities—designed for long missions and swift transitions.
Seamless Software Ecosystem
Compatible with SmartGo and LandStar for live pointing and adjustment, and CoPre / CoProcess for clean trajectory processing, point-cloud generation, and feature extraction.
True Indoor‑Outdoor Versatility
Operates flawlessly across environments—from woods to warehouses to tunnels—without manual georeferencing.
Highest ROI for SLAM Mapping
Replace multiple tools with one all-in-one device—no tripod, base-station, or loop‑tie points needed.
Professional-Grade Results
Achieve reliable, survey-quality output trusted by BIM, construction, heritage, forestry, and utility mapping professionals.
Fully Supported in Canada
Available with training, warranty, and expert support from Latnet Technologies Ltd.
Technical Specification
CHCNAV RS10 16 line and 32 line
The RS10 fuses high-precision GNSS RTK, laser SLAM, and visual SLAM in a single 1.9 kg handheld. Walk through tunnels, forests, building interiors, and power-line corridors and capture georeferenced point clouds in real time — with 5 cm absolute accuracy and better than 1 cm relative accuracy, even where satellites can't reach.

RS10 is built for surveyors, civil and BIM professionals, and teams working in forestry, power-line inspection, stockpile measurement, and underground spaces. RTK positioning continuously calibrates the SLAM trajectory in real time, so you scan in a straight, loop-free path and still get survey-grade, georeferenced results — no return visits, and no mandatory ground control points (though GCPs are still recommended for QA/QC).

CHCNAV's 4th-generation air-dielectric GNSS antenna and a 1408-channel board feed the SLAM engine for under-3 cm RTK in challenging conditions and 5 cm fused absolute accuracy.
View live point clouds in the field and cover up to 13,000 m² in one uninterrupted session — no loop closures, no post-processed georeferencing.
320,000 pts/sec across a 360°×270° field of view on the 16-line model, paired with a 200 Hz IMU for stable trajectory tracking.
When satellites drop out, SFix combines LiDAR ranging with SLAM angular constraints to deliver 5 cm accuracy within one minute — the last 100 m, solved.
Target points like a total station: pick a point in the live image and get its 3D coordinate to 5 cm accuracy within 15 m — no physical contact, no prism.
Under 2 kg, IP64-rated, with ~1 hour per battery and internal super-capacitors for hot-swapping mid-scan without losing position.
Bridges, building interiors, dense canopy, underground corridors — the places RTK alone can't measure. SFix fuses laser ranging information with SLAM angle constraints to compute accurate RTK point coordinates where satellites fail.
The new "SFix" fixed solution ensures 5 cm precision within 1 minute without satellite signals, finally solving the last-100-metre problem of conventional RTK.

Because RTK calibrates SLAM pose in real time, you don't need to close loops back to your start when GNSS is available. A 3 km traditional loop becomes about 1.8 km — roughly 40% more efficient, with no rework. (In SLAM-only work with no GNSS, loop closures are still recommended to control drift.)
The built-in SQC accuracy assessment algorithm flags quality live on the tablet so you never walk away with bad data:


The RS10's embedded processor (rated at 1.2 T of data computing power) runs real-time SLAM calculation and point-cloud browsing on the device itself — uninterrupted across areas up to 13,000 m².
Copy finished point-cloud results straight from RS10 memory through Type-C. For higher refinement, bring data into CoPre for secondary optimization down to 2 cm point-cloud thickness and better than 1 cm relative accuracy.
Capture outdoors with RTK — CORS or a single base station — and the SLAM trajectory carries that same reference seamlessly indoors, from the street to the basement.
At processing time you can output to any coordinate system and apply geoid files, so the point cloud lands in your project's datum and elevation reference. Prefer not to log into CORS? You can still obtain absolute coordinates through PPK post-processing or trajectory control-point optimization in CoPre.

Corridor capture with georeferenced trajectories.
Mapping in fully GNSS-denied spaces via SFix.
Fast, contactless volume calculation.
Interiors, facades and structures in one walk.
Terrain, vegetation and structures together.
Under-canopy capture where GNSS is blocked.
Corridor and facility inspection.
Contactless checks without climbing.
Mission control and automatic data capture from a tablet — connect over Wi-Fi, pick a scene, and scan. Or use One-Key control directly on the device.
Run the RS10 as a conventional GNSS rover for stakeout, point and line survey — and target points contactlessly with Vi-LiDAR.
POS processing, trajectory optimization, coloring and export to LAS and other formats — down to 2 cm thickness and <1 cm relative accuracy.
Automatically extract plan drawings, 3D drawings and section planes — one person can complete DLG extraction for 30 buildings in a day.
For advanced data extraction and further refinement, RS10 point clouds also export cleanly to industry-standard platforms. TerraSolid adds powerful classification, feature extraction, and 3D vector modelling on top of the CHCNAV workflow.
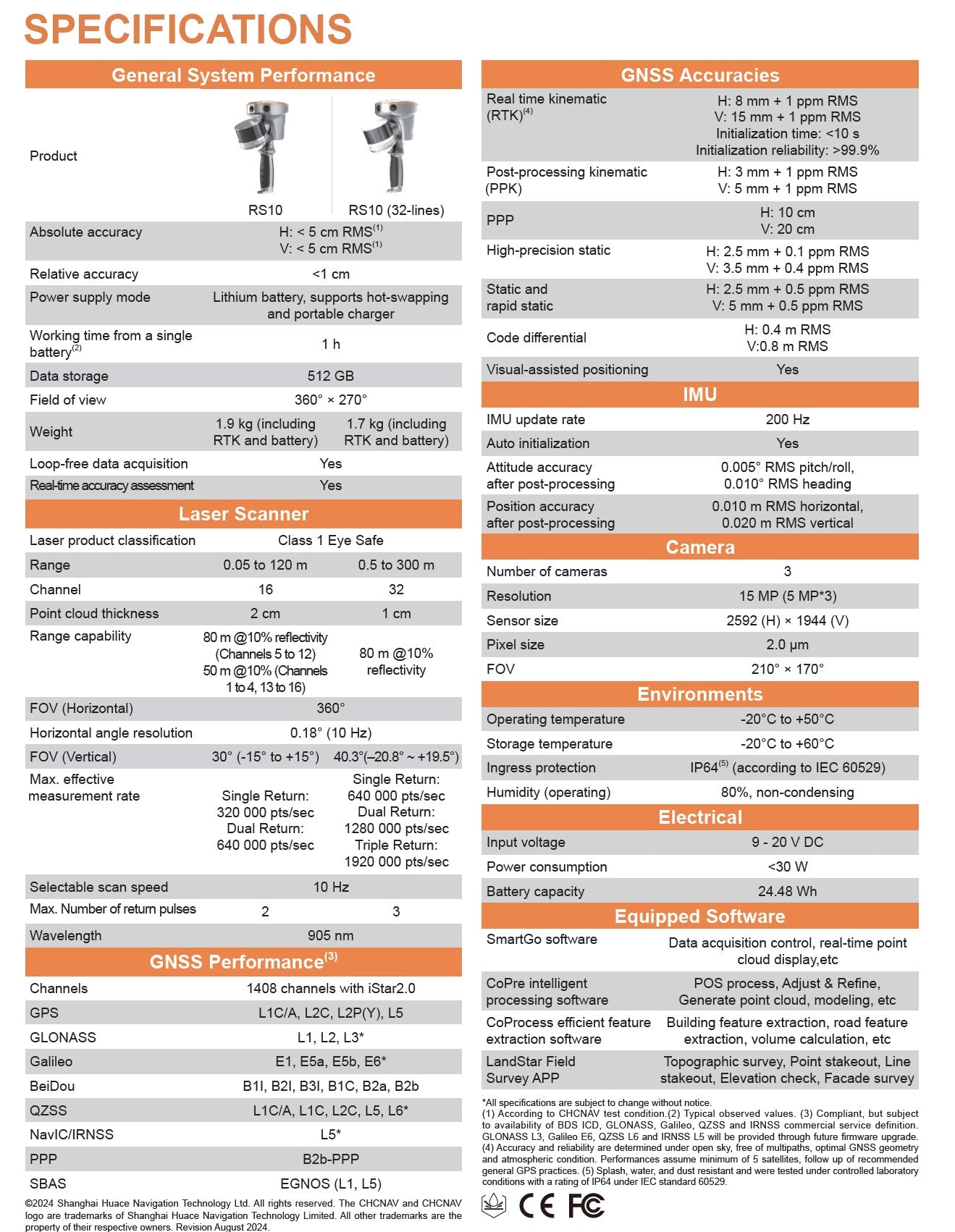
| Specification | RS10 (16 lines) | RS10 (32 lines) |
|---|---|---|
| Absolute accuracy | < 5 cm RMS | < 5 cm RMS |
| Relative accuracy | < 2 cm RMS | < 2 cm RMS |
| Real-time accuracy assessment | Yes (< 1 cm) | Yes (< 1 cm) |
| Laser channels | 16 | 32 |
| Range | 0.05 – 120 m | 0.5 – 300 m |
| Point cloud thickness | 2 cm | 1 cm |
| Measurement rate (single return) | 320,000 pts/sec | 640,000 pts/sec |
| Field of view | 360° × 270° | 360° × 270° |
| Horizontal angle resolution | 0.18° (10 Hz) | 0.18° (10 Hz) |
| Laser class / wavelength | Class 1 eye-safe / 905 nm | Class 1 eye-safe / 905 nm |
| RTK accuracy | H: 8 mm + 1 ppm · V: 15 mm + 1 ppm | H: 8 mm + 1 ppm · V: 15 mm + 1 ppm |
| PPK accuracy | H: 3 mm + 1 ppm · V: 5 mm + 1 ppm | H: 3 mm + 1 ppm · V: 5 mm + 1 ppm |
| GNSS channels | 1408 (iStar 2.0) | 1408 (iStar 2.0) |
| Cameras | 3 × 5 MP (15 MP) · FOV 210° × 170° | 3 × 5 MP (15 MP) · FOV 210° × 170° |
| IMU update rate | 200 Hz | 200 Hz |
| Data storage | 512 GB | 512 GB |
| Weight (with RTK & battery) | 1.9 kg | 1.7 kg |
| Power / consumption | 9–20 V DC / < 30 W | 9–20 V DC / < 30 W |
| Battery | Hot-swappable, ~1 h per battery | Hot-swappable, ~1 h per battery |
| Operating temperature | −20 °C to +50 °C | −20 °C to +50 °C |
| Ingress protection | IP64 (IEC 60529) | IP64 (IEC 60529) |
Both share the same RTK, cameras, IMU and 5 cm absolute accuracy. The 16-line model (XT16) ranges 0.05–120 m at 320,000 pts/sec with 2 cm point-cloud thickness and weighs 1.9 kg. The 32-line model (XT32M2X) ranges 0.5–300 m at 640,000 pts/sec with 1 cm thickness and weighs 1.7 kg — better for long-range and high-density work.
It depends whether you're scanning or taking individual point measurements. When scanning, you select the capture scene that matches the environment — indoor/outdoor fusion, indoor, outdoor, open area, or tunnel — and the laser and visual SLAM engine carries the positioning, while RTK continuously calibrates the trajectory wherever signal is available. The trajectory stays in one continuous reference frame, so everything stays georeferenced as you move from open sky into a tunnel or basement. For individual RTK point measurements (rover mode), CHCNAV's SFix technology fuses LiDAR ranging with SLAM angular constraints to reach a fixed solution with 5 cm accuracy within one minute — solving the "last 100 m" where RTK alone can't fix.
When you're using GNSS (RTK or PPK), you don't need to walk loops — RTK calibrates the SLAM pose in real time, so loop-free path planning works and a 3 km traditional loop becomes roughly 1.8 km. PPK is a valid alternative to RTK in the field; the spec sheet actually rates PPK higher (H: 3 mm + 1 ppm / V: 5 mm + 1 ppm). In SLAM-only work with no GNSS, loop closures are still recommended to control drift.
Ground control points aren't mandatory for an RTK/PPK workflow, but they're recommended for QA/QC and to further improve georeferencing and accuracy. Use a minimum of 4 points, imported into CoPre and matched to the trajectory control points you collected in the field. They can supplement an RTK/PPK workflow, or — for SLAM-only projects — provide the georeferencing itself, either relatively or to absolute coordinates. At processing you can output to any coordinate system and apply geoid files to match your project datum.
Vi-LiDAR lets the RS10 target points like a total station. You collect image data of the scene, tap the point of interest in the LandStar image, and the system calculates its 3D coordinate from the intersection of the RTK survey ray and the LiDAR point cloud — accurate to 5 cm within 15 m, with no physical contact and no prism.
Yes. The RS10 holder is removable for RTK rover mode, and it runs in CHCNAV LandStar 8 for topographic survey, point and line stakeout, elevation check and facade survey — the same workflow existing CHC RTK users already know, with minimal additional training.
About one hour per battery. Internal super-capacitors support hot-swapping: when you remove the battery during collection, a 60-second replacement window appears on the tablet. Complete the swap within 60 seconds while keeping the device's position and orientation steady, and the scan continues uninterrupted.
Not necessarily. The RS10 runs real-time SLAM solving on board (its embedded processor is rated at 1.2 T of data computing power) so you can copy finished point clouds straight from device memory over Type-C. For maximum refinement — 2 cm point-cloud thickness and better than 1 cm relative accuracy — bring the data into CoPre for secondary optimization.
The RS10 works with SmartGo (capture & control), LandStar 8 (RTK field survey), CoPre (point-cloud processing) and CoProcess (feature extraction). The package ships with a permanent SLAM license and CoPre — contact Latnet for the current configuration and any optional modules.
Yes. Latnet Technologies Ltd. is Canada's CHCNAV dealer, offering the RS10 with training, warranty, and expert after-sales support, plus rental and used options. Call +1 (403) 397 2210 or book a live demo.
Book a live demo or talk to the Latnet team about configuration, training, rentals, and nationwide delivery across Canada.
Book a Demo →Handheld SLAM3D laser scanner + GNSS RTK System

