Software
-
CoProcess
CHCNAV CoProcess is advanced LiDAR processing software for point cloud classification, terrain modeling, and volume analysis. Streamlines data workflows for surveyors, engineers, and geospatial professionals. Download CoProcess here.
Free to use in viewer mode.
Purchase here.
Download Manual.
Download CoProcess. -
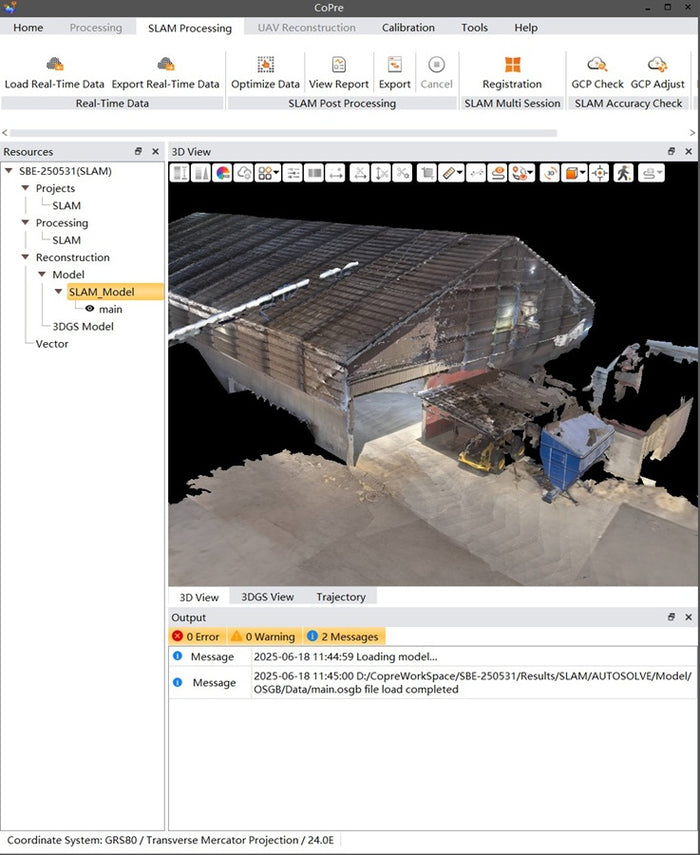
CoPre
CHCNAV CoPre streamlines your LiDAR workflow by adjusting flight trajectories, colorizing point clouds using camera images, and organizing data for efficient processing. Perfect for UAV, SLAM and mobile LiDAR missions. Download CoPre and here.
Purchase here.
Download Canadian Geoid Models.
Download Manual.
Download CoPre. -

Landstar
CHCNAV LandStar is a powerful field data collection app for surveying, mapping, and construction tasks. It supports GNSS receiver and Total Station control, topographic surveys, stakeout, CAD drawing import, and more — all from an intuitive Android interface. Use it on any Android device. You can Download Landstar here.
Purchase Here.
Download Manual.
Download Landstar. -
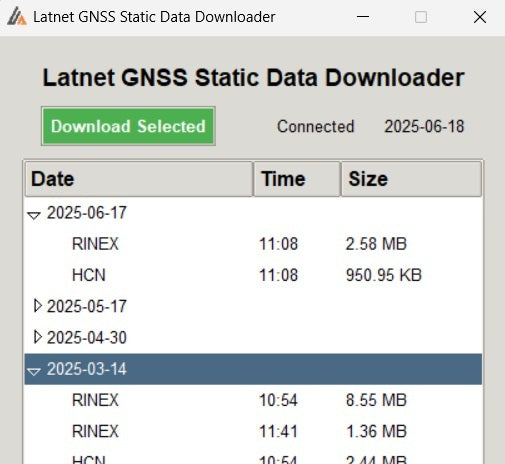
Static Data Downloader
Easily download RINEX or HCN static data from your CHCNAV GNSS receiver over Wi-Fi. Designed by Latnet Technologies for convenience, this tool is simple to use, fast, and completely free. Ideal for surveyors who need quick access to static logs without cables or additional software.
Video guide is here.

Sample Data
Latnet Technologies LiDAR Sample Data
Explore Our High-Resolution LiDAR Data Collection
Note: The sample point clouds displayed here are optimized for online viewing and may have reduced resolution compared to the final deliverables.
Viewer Tips: Please allow a few moments for the data to fully render. For enhanced detail, increase the point budget in the viewer settings. Double-click to zoom and set the center of rotation.
Full Dataset: To explore the full-resolution dataset, download the files. All data was processed using CHCNAV CoPre with no additional post-processing applied.
This dataset, captured using the CHCNAV AlphaUni 20 (AU20) vehicle-mounted LiDAR system, covers part of a town. Streets, buildings, and roadside infrastructure were scanned in detail, supporting smart city planning, utility management, and engineering applications. The comprehensive 3D dataset replaces days or weeks of traditional survey work, with all features — from curb lines to overhead cables — captured in a single pass. The georeferenced point cloud serves as a permanent digital twin, enabling precise measurements, analysis, and virtual revisits without needing to return to the site.
This dataset was created using the CHCNAV AlphaUni 20 (AU20) in backpack configuration, for topographic surveys in UAV-restricted, non-drivable, and GNSS-limited environments. Captured across a residential neighborhood, the system uses advanced SLAM algorithms to maintain accuracy where satellite visibility is partial or obstructed — such as urban canyons, under trees, or near buildings. The result is a complete, survey-grade dataset of streets, structures, and terrain, collected in a single pass. It's a fast, reliable solution for urban planning, asset management, and terrain modeling.
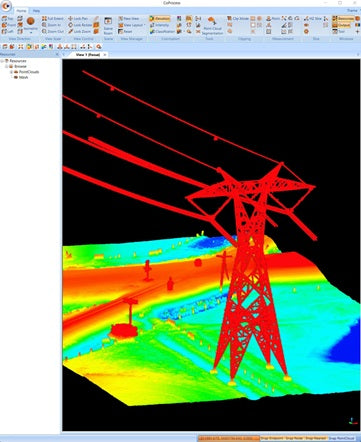
This dataset was produced using the CHCNAV AlphaAir 10 (AA10) UAV LiDAR system mounted on an X500 platform. The survey focused on topographic, powerline and railway infrastructure, enabling extraction of pole locations, wire clearances, and structural features such as wire sag and ground height at road crossings. The high-density point cloud offers precise spatial context for asset monitoring, safety analysis, and as-built documentation. Compared to traditional survey methods, the AA10 captures hard-to-access assets faster, safer, and with complete 3D visibility.
This dataset was generated using the CHCNAV AlphaAir 10 (AA10) LiDAR system mounted on an X500 UAV platform, designed to efficiently cover dense forest areas. The resulting point cloud supports extraction of tree locations, trunk diameters, and canopy structure for detailed topographic and environmental analysis. With up to 8 return echoes, the AA10 penetrates vegetation to capture accurate ground elevation. Ideal for forestry planning, biomass assessment, and ecological studies, it collects rich 3D data in hours—far faster and more complete than traditional ground-based methods.
This dataset was captured using the CHCNAV AlphaAir 10 (AA10) LiDAR system mounted on an X500 UAV platform, flown over an active gravel pit. The goal was to conduct a detailed volumetric survey for measuring stockpile volumes and identifying topographic changes since the previous scan. With its high-density point cloud and exceptional vertical accuracy, the AA10 enables fast, precise cut-and-fill analysis to support operational planning, and resource management. It delivers complete data coverage in a fraction of the time compared to traditional survey methods—ideal for mining and material tracking.
This dataset was captured using the CHCNAV RS10 handheld SLAM LiDAR system during an exterior walkthrough of a historical building. The scan focused on capturing the architectural facades and surrounding area, producing a high-resolution georeferenced point cloud aligned to the coordinate system. The RS10's advanced SLAM algorithms ensure precise positioning even in GNSS-obstructed areas, making it ideal for urban heritage sites. The dataset supports topographic mapping, as-built documentation, and restoration planning, delivering reliable spatial data for CAD and design work.
This dataset was collected using the CHCNAV RS10 handheld SLAM LiDAR system during walk-through of a densely forested area. The scan targeted tree position mapping, trunk measurement, and canopy analysis for environmental and forestry applications. Thanks to SLAM algorithms, the RS10 operated effectively in GNSS-obstructed terrain, capturing detailed under-canopy structure and topography. When merged with aerial LiDAR data from systems like the CHCNAV AA10, the result is a complete 3D dataset that supports forest planning, biomass modeling, and ecological assessments.
This dataset was collected using the CHCNAV RS10 handheld SLAM LiDAR system during a walking survey of a public park. The goal was to create a high-resolution topographic map of terrain, vegetation, pathways, and structures using GNSS post-processed georeferencing. The resulting 3D point cloud supports the production of topographic plans, environmental reports, and landscape designs. The RS10's portability and SLAM precision make it ideal for scanning large outdoor areas efficiently, especially where aerial mapping is restricted or less practical due to canopy coverage or safety concerns.
This point cloud dataset was acquired using the CHCNAV AlphaAir 450 (AA450) UAV LiDAR system during a mission over a remote pipeline corridor with no road access. The goal was to extract accurate bare-earth terrain for as-built documentation, engineering design, and environmental analysis. The AA450's lightweight build and multi-return capability enabled precise terrain modeling. The result is a georeferenced, survey-grade dataset ideal for pipeline planning, monitoring, and compliance workflows where traditional surveys would be challenging or time-consuming.
This point cloud dataset was collected using the FJDynamics P1 handheld SLAM LiDAR scanner during a walkthrough survey of a historic church exterior and interior. The compact, all-in-one design allowed rapid and efficient data collection of facades, structures, and terrain with minimal setup. The resulting colorized point cloud delivers centimeter-level detail, ideal for heritage documentation, architectural planning, and topographic referencing. With no need for external GNSS or control points, the P1 offers a cost-effective solution for capturing accurate 3D models of complex built environments.
This point cloud dataset was collected using the CHCNAV RS10 SLAM LiDAR scanner in both 16-line and 32-line configurations, following closely matched walkthrough survey routes. This acquisition method allows for a clear and reliable comparison of point density, capture range, and overall data quality between the two versions. The 32-line setup produced higher point density, capturing at greater distances, while the 16-line configuration still provided consistent coverage with a more compact data footprint. During processing, no distance-based filters were applied, ensuring that the complete range of measurements was retained for an accurate and unbiased evaluation.